Skip to content
Pedagogy Zone
Menu
Home
Auto
Tech
Education
Robotics
General Considerations in Robot Material Handling
By
Santhakumar Raja
—
25/04/2022
A Computer as the Workcell Controller
By
Santhakumar Raja
—
24/04/2022
Other Considerations in Workcell Design
By
Santhakumar Raja
—
24/04/2022
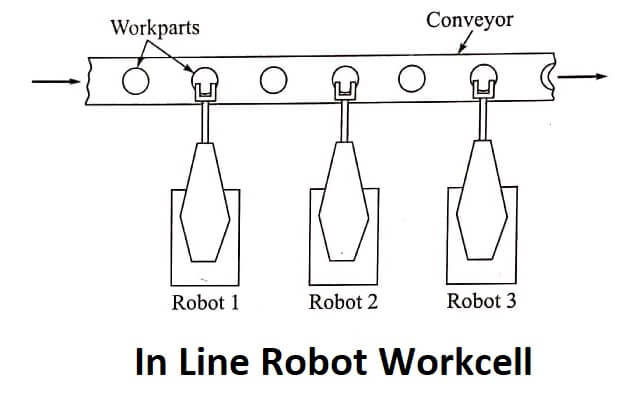
Robot Cell Layouts – Pedagogy Zone
By
Santhakumar Raja
—
23/04/2022
Artificial Intelligence and Robotics
By
Santhakumar Raja
—
22/04/2022
Goals of Artificial Intelligence (AI) Research
By
Santhakumar Raja
—
21/04/2022
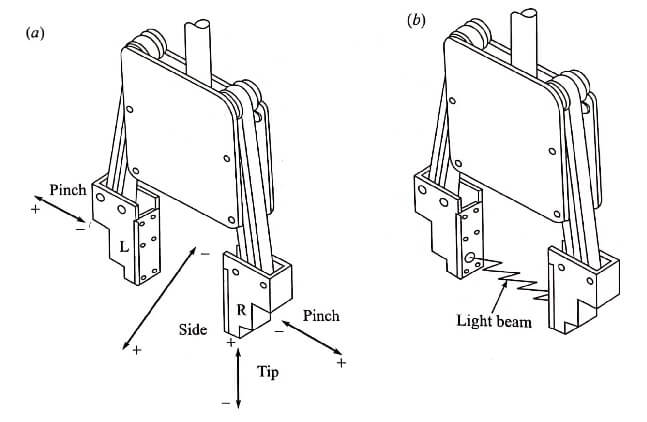
Gripper Sensing Capabilities – Industrial Robotics
By
Santhakumar Raja
—
20/04/2022
Robot Language Structure – Pedagogy Zone
By
Santhakumar Raja
—
08/04/2022
Generations of Robot Programming Languages
By
Santhakumar Raja
—
28/03/2022
The Textual Robot Language – Pedagogy Zone
By
Santhakumar Raja
—
28/03/2022
Previous
1
2
3
4
5
Next
Law
IOCL Barauni Refinery Apprentice Online Form 2026 – Apply for 224+ Vacancies | Eligibility and Dates
New Child Support Law Explained: Impact on Custody, Payments and Parents
Which Subjects and Syllabus Are Covered in Presidency Exams 2025?
Which Statement Accurately Describes the Fourth Amendment
Are Political Signs Protected by the First Amendment
Health science
USABO Past Exams 2025: Latest Resources, Practice Papers and Preparation Tips
TN Paramedical Rank List 2025 Released – Download PDF and Check Counselling Dates
Understanding Typhoid: Symptoms, Treatment, and Recovery Tips
Robotic Orthopaedic Surgery: Revolutionizing Precision and Patient Outcomes
Physics in Medicine and Biology Impact Factor: Bridging Science and Healthcare
Home
Auto
Tech
Education
Close
Search for: