The Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) Medium Access Control algorithm was designed for the popular WiFi wireless network technology. CSMA/CA also senses the transmission channel before transmitting a frame. Furthermore, CSMA/CA tries to avoid collisions by carefully tuning the timers used by CSMA/CA devices.
CSMA/CA uses acknowledgements like CSMA. Each frame contains a sequence number and a CRC. The CRC is used to detect transmission errors while the sequence number is used to avoid frame duplication. When a device receives a correct frame, it returns a special acknowledgement frame to the sender.
CSMA/CA introduces a small delay, named Short Inter Frame Spacing (SIFS), between the reception of a frame and the transmission of the acknowledgement frame. This delay corresponds to the time that is required to switch the radio of a device between the reception and transmission modes.
Compared to CSMA, CSMA/CA defines more precisely when a device is allowed to send a frame. First, CSMA/CA defines two delays : DIFS and EIFS. To send a frame, a device must first wait until the channel has been idle for at least the Distributed Coordination Function Inter Frame Space (DIFS) if the previous frame was received correctly.
However, if the previously received frame was corrupted, this indicates that there are collisions and the device must sense the channel idle for at least the Extended Inter Frame Space (EIFS), with SIF S < DIF S < EIF S. The exact values for SIFS, DIFS and EIFS depend on the underlying physical layer.
The figure below shows the basic operation of CSMA/CA devices. Before transmitting, host A verifies that the channel is empty for a long enough period. Then, its sends its data frame. After checking the validity of the received frame, the recipient sends an acknowledgement frame after a short SIFS delay.
Host C, which does not participate in the frame exchange, senses the channel to be busy at the beginning of the data frame. Host C can use this information to determine how long the channel will be busy for. Note that as SIF S < DIF S < EIF S, even a device that would start to sense the channel immediately after the last bit of the data frame could not decide to transmit its own frame during the transmission of the acknowledgement frame.

The main difficulty with CSMA/CA is when two or more devices transmit at the same time and cause collisions. This is illustrated in the figure below, assuming a fixed timeout after the transmission of a data frame. With CSMA/CA, the timeout after the transmission of a data frame is very small, since it corresponds to the SIFS plus the time required to transmit the acknowledgement frame.

To deal with this problem, CSMA/CA relies on a backoff timer. This backoff timer is a random delay that is chosen by each device in a range that depends on the number of retransmissions for the current frame. The range grows exponentially with the retransmissions as in CSMA/CD.
The minimum range for the backoff timer is [0, 7 ∗ slot Time] where the slot Time is a parameter that depends on the underlying physical layer. Compared to CSMA/CD’s exponential backoff, there are two important differences to notice. First, the initial range for the backoff timer is seven times larger.
This is because it is impossible in CSMA/CA to detect collisions as they happen. With CSMA/CA, a collision may affect the entire frame while with CSMA/CD it can only affect the beginning of the frame. Second, a CSMA/CA device must regularly sense the transmission channel during its back off timer. If the channel becomes busy (i.e. because another device is transmitting), then the back off timer must be frozen until the channel becomes free again.
Once the channel becomes free, the back off timer is restarted. This is in contrast with CSMA/CD where the back off is recomputed after each collision. This is illustrated in the figure below. Host A chooses a smaller backoff than host C. When C senses the channel to be busy, it freezes its backoff timer and only restarts it once the channel is free again.

The pseudo-code below summarises the operation of a CSMA/CA device. The values of the SIFS, DIFS, EIFS and slot Time depend on the underlying physical layer technology
# CSMA/CA simplified pseudo-code N=1 while N<= max : waitUntil(free(channel)) if correct(last_frame) : wait(channel_free_during_t >=DIFS) else: wait(channel_free_during_t >=EIFS) back-off_time = int(random[0,min(255,7*(2^(N-1)))])*slotTime wait(channel free during backoff_time) # backoff timer is frozen while channel is sensed to be busy send(frame) wait(ack or timeout) if received(ack) # frame received correctly break else: # retransmission required N=N+1
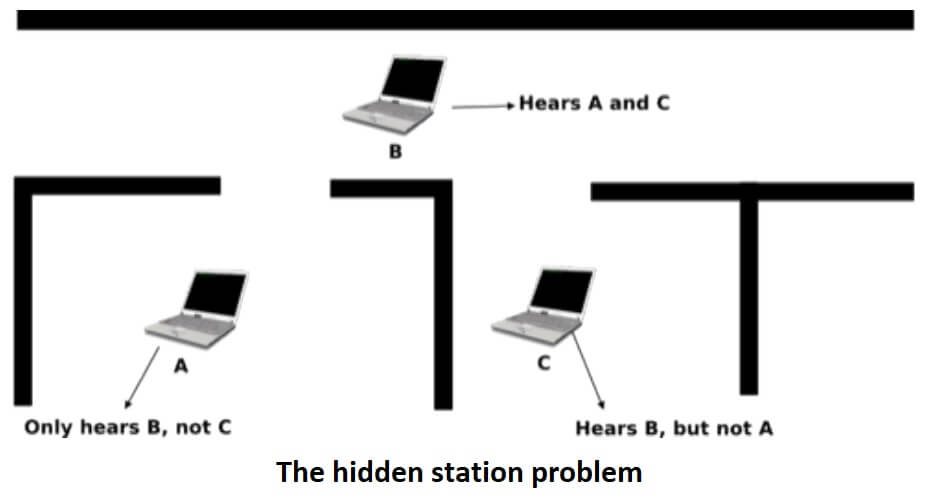
Another problem faced by wireless networks is often called the hidden station problem. In a wireless network, radio signals are not always propagated same way in all directions.
For example, two devices separated by a wall may not be able to receive each other’s signal while they could both be receiving the signal produced by a third host. This is illustrated in the figure below, but it can happen in other environments.
For example, two devices that are on different sides of a hill may not be able to receive each other’s signal while they are both able to receive the signal sent by a station at the top of the hill. Furthermore, the radio propagation conditions may change with time.
For example, a truck may temporarily block the communication between two nearby devices.
To avoid collisions in these situations, CSMA/CA allows devices to reserve the transmission channel for some time. This is done by using two control frames : Request To Send (RTS) and Clear To Send (CTS). Both are very short frames to minimize the risk of collisions.
To reserve the transmission channel, a device sends a RTS frame to the intended recipient of the data frame. The RTS frame contains the duration of the requested reservation. The recipient replies, after a SIFS delay, with a CTS frame which also contains the duration of the reservation. As the duration of the reservation has been sent in both RTS and CTS, all hosts that could collide with either the sender or the reception of the data frame are informed of the reservation.
They can compute the total duration of the transmission and defer their access to the transmission channel until then. This is illustrated in the figure below where host A reserves the transmission channel to send a data frame to host B. Host C notices the reservation and defers its transmission.

The utilization of the reservations with CSMA/CA is an optimisation that is useful when collisions are frequent. If there are few collisions, the time required to transmit the RTS and CTS frames can become significant and in particular when short frames are exchanged. Some devices only turn on RTS/CTS after transmission errors.
| Read More Topics |
| Routing in IP networks |
| ALOHA in computer network |
| TCP connection establishment |
| Machine loading and unloading |