Skip to content
Pedagogy Zone
Menu
Home
Auto
Tech
Education
Robotics
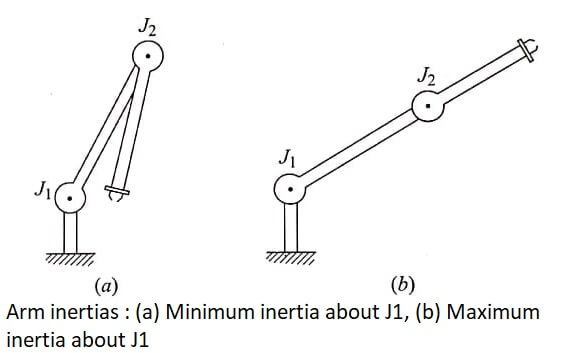
Robot Arm Dynamics – Pedagogy Zone
By
Santhakumar Raja
—
17/03/2022
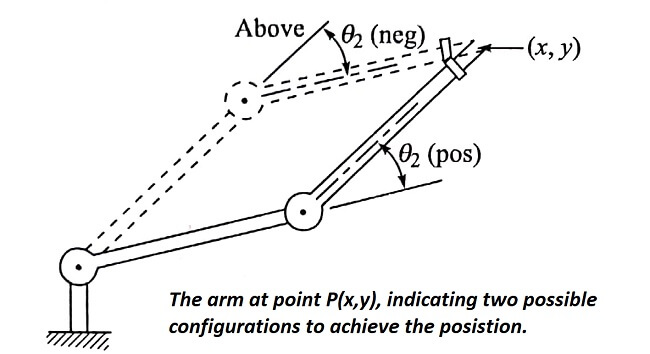
Reverse Transformation of the 2-Degree of Freedom Arm
By
Santhakumar Raja
—
16/03/2022
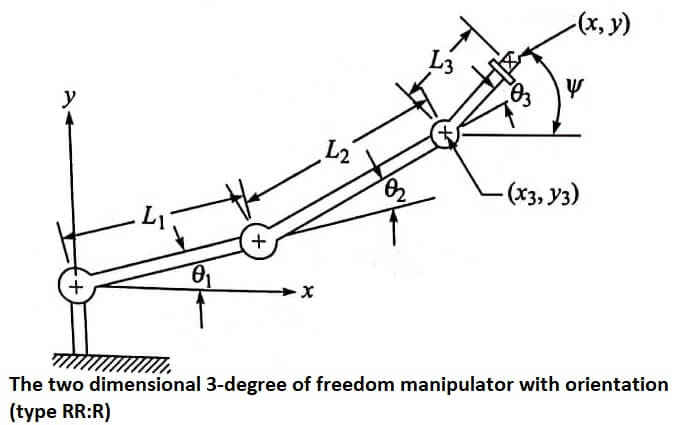
A 3-Degree of Freedom Arm in Two Dimensions
By
Santhakumar Raja
—
16/03/2022
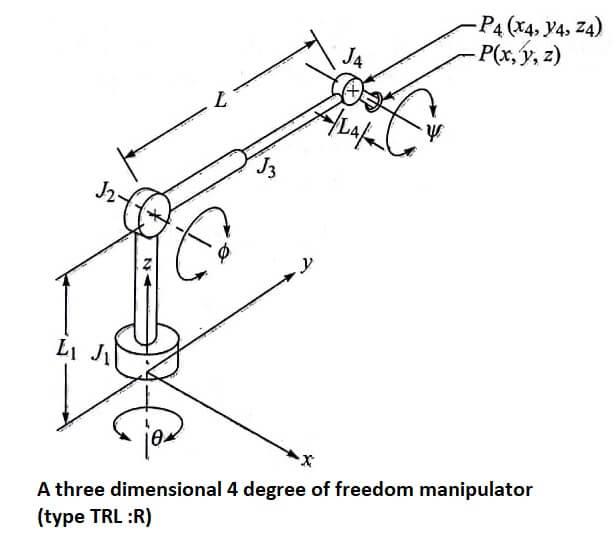
A 4-Degree of Freedom Manipulator in Three Dimensions
By
Santhakumar Raja
—
14/03/2022
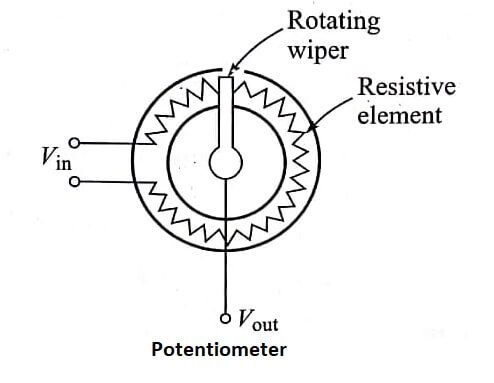
Robot Sensors and Actuators – Pedagogy Zone
By
Santhakumar Raja
—
14/03/2022
Four Types of Robot Controls – Pedagogy Zone
By
Santhakumar Raja
—
13/03/2022
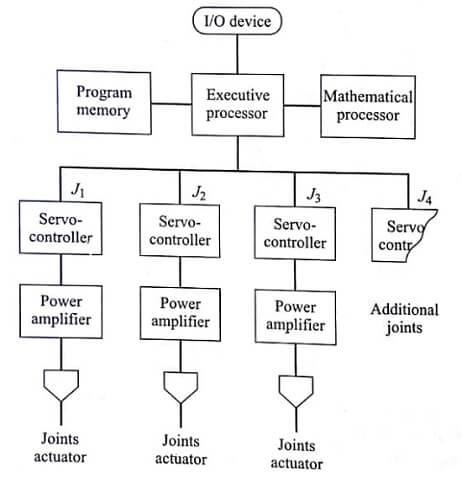
Configuration of a Robot Controller
By
Santhakumar Raja
—
09/03/2022
Robot Applications – Pedagogy Zone
By
Santhakumar Raja
—
08/03/2022
Robot Programming and Work Cell Control
By
Santhakumar Raja
—
08/03/2022
Speed of Motion and Load Carrying Capacity
By
Santhakumar Raja
—
05/03/2022
Previous
1
2
3
4
5
Next
Law
IOCL Barauni Refinery Apprentice Online Form 2026 – Apply for 224+ Vacancies | Eligibility and Dates
New Child Support Law Explained: Impact on Custody, Payments and Parents
Which Subjects and Syllabus Are Covered in Presidency Exams 2025?
Which Statement Accurately Describes the Fourth Amendment
Are Political Signs Protected by the First Amendment
Health science
USABO Past Exams 2025: Latest Resources, Practice Papers and Preparation Tips
TN Paramedical Rank List 2025 Released – Download PDF and Check Counselling Dates
Beyond the Continental Shelf: Breakthroughs in Deep Offshore Technology
American Universities with Best Environmental Science Programs
Environment Protection Act 1986: A Complete UPSC Guide (With Case Studies)
Home
Auto
Tech
Education
Close
Search for: